
豆蔵、板金業界の人手不足解決を支援するため レーザ溶接ロボットの自動ティーチング位置補正を提供開始
株式会社豆蔵デジタルホールディングスの事業会社である、株式会社豆蔵(本社:東京都新宿区、代表取締役社長:中原 徹也、以下 「豆蔵」)は、2023年10月から、レーザ溶接ロボット用の自動ティーチング位置補正システムの提供を開始します。
自動ティーチング位置補正システムの提供背景と概要
日本の製造業界において、人手不足が深刻な問題となっており、特に板金加工の溶接工程においては人手不足が顕著であり、業界全体に影響を及ぼしています。
近年、人材不足を背景として、レーザ溶接の自動システムにおけるロボットの活用が広まっています。
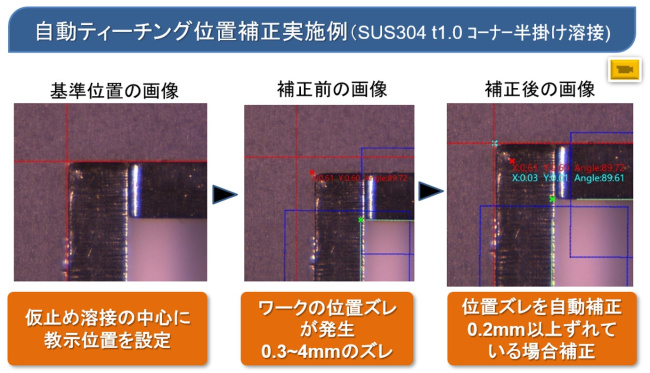
しかし、ロボットを用いたレーザ溶接では、同一の処理を繰り返し溶接する場合でも、対象となる個体の違いや溶接による歪み、治具の設置誤差などがあり、手動での補正作業が課題となっていました。
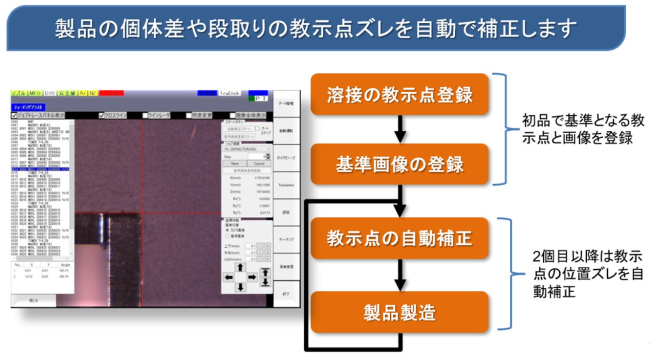
豆蔵は、当該課題に対処するため、自動ティーチング位置補正システムを開発しました。当社のシステムは、同様の対象を繰り返し溶接する際、最初に登録した基準画像をもとに、カメラを使用してズレを検出し、位置を自動補正する機能を備えています。
当社のシステムは、溶接ロボットを導入済みのお客様や今後ロボット化を検討しているお客様にとって、上記の課題を解決するうえで、非常に有用なものと確信しています。人手不足の問題に立ち向かうための強力なツールとして、当社のシステムがご利用いただけることを期待しています。
自動ティーチング位置補正システムの特徴
- カメラを使った画像処理により、溶接位置のXY軸補正を実施
画像処理技術を使用して、カメラ視野内の溶接位置近傍の特徴点を検出し、その特徴点と溶接位置の位置関係を登録します。リピート時の溶接では、このデータを元に位置補正が行われます。 - Z軸補正によるフォーカスの自動調整を実施
コントラスト方式は開発完了しております。他の方式については、都度対応予定です。 - 安川電機MOTOMANシリーズを適用
適用実績は、安川電機製GAシリーズ、GPシリーズ、ARシリーズなどがあります。今後、他のメーカーに対応予定です。 - 個々の教示点に対して溶接条件を管理し、効率的なプロセス制御を実現
教示点ごとに、補正の基準となる画像と溶接条件を登録し、管理します。自動補正後の画像も保存されるため、事後における不具合や不良の原因調査が可能です。 - 多様な動作モードが利用可能
◇動作モードには、「手動」と「自動」と「即時」があります。
・「手動」:全てのティーチング位置を連続して補正し、補正後の位置データを更新後、押しボタンスイッチで溶接するモードです。
・「自動」:全てのティーチング位置を連続して補正し、補正後の位置データを更新後、自動的に溶接に移行するモードです。
・「即時」:溶接線ごとに補正と溶接を繰り返すモードです。これにより溶接による補正位置の歪み誤差をキャンセルできます。
◇また、上記動作モードとは別に、「オートステップ機能」も利用できます。次の溶接位置に移動する際に、オペレータがボタンを押下して移動するか、自動で移動するかを選択できます。
自動ティーチング位置補正システムのイメージ
※記載の会社名・製品名は、各社の商標または登録商標です。
※本ドキュメントの掲載内容は発表時の情報です。
プレスリリース(PDF)
サービスに関するお問い合わせ
株式会社豆蔵 エンジニアリングソリューション事業部 レーザロボットシステム部
〒252-0239 神奈川県相模原市中央区中央5丁目9-1(相模原R&Dセンター)
TEL:050-3321-3007 FAX:042-776-8002
E-Mail:laser-robot@mamezou.com