
豆寄席第48回『2025国際ロボット展に見るフィジカルAI最前線』開催報告
本稿は、豆寄席第48回の開催報告です。
開催概要
| タイトル | 2025国際ロボット展に見るフィジカルAI最前線 |
| 講演者 | 株式会社豆蔵 エンジニアリングソリューション事業部 大国征司 |
| 開催日時 | 2026年1月28日(水)18時30分~20時00分 |
| 講演概要 |
世界最大級のロボット展示会である「2025国際ロボット展(iREX)」が、2025年12月3日~6日に開催されました。今回のiREXで特に注目を集めたのは、フィジカルAIとヒューマノイドロボットでした。生成AIの波はロボットにも広がり、現実世界で「動いて働くAI」=フィジカルAIが急速に進化しています。それに伴い、ヒューマノイドロボットも大きな進化を遂げ、世界規模で開発競争が加速しています。今回の豆寄席では、iREXの展示動向を踏まえつつ、豆蔵でのAIロボティクスの取り組みも交えながら、AIロボティクスの全体像(認識・計画・制御・学習)、ヒューマノイドの現在地、そして産業利用に向けた課題(安全性・生産性・信頼性)を技術解説とともにご紹介します。 |
講演の流れ
豆蔵の技術コンサルタントで、現在はAIロボティクス事業の責任者である大国さんから、フィジカルAIおよびヒューマノイドロボットの最新の動向についてお話をいただきました。
- はじめに
- 2025国際ロボット展
- フィジカルAIの最新動向・技術解説・豆蔵事例
- ヒューマノイドロボットの最新動向・技術解説・豆蔵事例
- まとめ
1. はじめに
はじめに、生成AIが現実世界へと進出した「フィジカルAI」が注目を集めており、産業構造を大きく変える転換点にあることが紹介されました。
産業用ロボット分野で高い存在感を持つ日本は、フィジカルAIの分野では海外に後れを取っている現状にあり、この点に対する強い危機感が示されました。
本講演を通じて、日本国内でフィジカルAIに取り組むプレイヤーが増えていくことへの期待が語られました。
2. 2025 国際ロボット展
国際ロボット展は、隔年で開催される世界最大級のロボット専門展示会です。
2025年12月に開催された展示会は、コロナ禍以前を上回る来場者数を記録し、非常に盛況なイベントとなりました。
講演では、会場全体を通して、フィジカルAIやヒューマノイドロボットが大きなトレンドとして感じられた、との紹介がありました。
豆蔵としても本展示会に出展し、豆蔵として初の製品となる食品盛り付けロボット「美膳」を発表しました。
そのほかにも多数の展示を行い、多くの来場者の関心を集めました。
3. フィジカル AI の最新動向・技術解説
フィジカル AI の基本的な考え方
講演ではまず、フィジカルAIの基本的な考え方が整理されました。
フィジカルAIによって、AIは物理世界を認識・理解し、実際に作用することが可能になる点が強調されました。
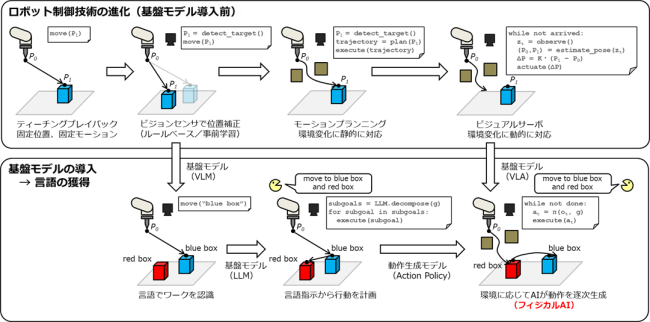
ロボット制御技術の深化と基盤モデルの導入
続いて、フィジカルAIの技術がロボット制御技術に対してどのように影響を与えているかの説明が行われました。
従来のルールベース制御から、言語理解や行動生成を伴うフィジカルAIへの変化が、制御構造の違いとして分かりやすく整理されています。
ロボット開発におけるパラダイムの変化
フィジカルAIに対するAIロボティクスという言葉についても整理が示されました。
AIロボティクスはフィジカルAIと似た言葉であるものの、その捉え方には大きな違いがあるようです。
まず、用語の定義として、AIロボティクスはロボットを起点としてAIを活用し、ロボットの知能化を進めていくという文脈で用いられる言葉です。
一方でフィジカルAIは、AIを起点とし、物理世界へ作用するための手段としてロボットを位置づける考え方を指します。
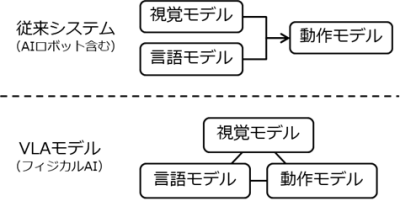
こうした立場の違いを背景に、AIロボティクスでは、視覚・言語・動作といった要素を、シーケンシャルにつないでいく従来型の開発手法が意識されやすいのに対し、フィジカルAIでは、VLAに代表されるように、これらをひっくるめて学習するというパラダイムの変化が起こっていると説明されました。
講演では、こうした変化を踏まえ、従来の延長として捉えるのではなく、開発に対する意識や考え方をアップデートしていく必要がある、というメッセージが示唆されていました。
4. ヒューマノイドロボットの最新動向・技術解説
ヒューマノイドロボットブーム
展示会では、ヒューマノイドロボットが数多く出展されており、強い存在感を放っていました。
歩行制御におけるSim2Real技術の確立や、中国を中心とした製品化の進展を背景に、ヒューマノイドロボットは研究段階から実用化に向けたフェーズへと移行しつつあると、講演の中で説明されました。
ヒューマノイドロボットの適用と課題
講演では、「なぜヒューマノイドロボットなのか」という点についても説明がありました。
人間社会のインフラは人の身体仕様を前提に設計されているため、ヒューマノイドは社会の構造を大きく変えずに導入できる点や、汎用性・柔軟性を活かして多様な作業に対応できる点が理由として挙げられました。
また、製造・物流から生活支援・公共サービスまで、労働力不足への対応手段となり得る可能性があることも示されました。

一方で、ヒューマノイドロボットが短期的にすべての産業用ロボットを置き換えるわけではない点も指摘されました。
産業用ロボットは工場での高精度・高速な作業に最適化されており、ヒューマノイドロボットは汎用性を活かしたサービス分野を主戦場とする、との整理が示されました。
両者は用途や設計思想が異なることから、基本的には棲み分けが進むと説明されました。
また、要求レベルが比較的低い環境からヒューマノイドロボットが導入されていく余地がある、との見方も示されました。
今後については、工場や物流倉庫、災害対応などのBtoB領域で信頼性を高めつつ、長期的には実社会向け(BtoC)での活用に向けた環境整備が進んでいくと見込まれる、との説明がありました。
5. まとめ
最後に、講演のまとめとして、以下の点が示されました。
- AIロボティクスとフィジカルAIは、異なるパラダイムとして整理される
- フィジカルAIの登場により、ロボット開発のあり方が大きく変わる可能性がある
- ヒューマノイドロボットは、ロボットの社会実装を進める起爆剤となる可能性がある
- 産業利用においては、従来システムと棲み分けながら活用が進んでいくと考えられる
所感
近年のAIのトレンドを踏まえると、複数のモダリティを包括的に理解するフィジカルAIの進展によって、AIロボットやヒューマノイドロボットがさまざまな場面で活躍する未来が、すぐそこまで迫っているのではないかという期待感を強く抱いています。フィジカルAIが視覚・言語・動作を統合的に扱うことで、従来のロボット技術では実現が難しかった、環境に応じた自然でリアルタイムな動作が可能になると感じました。
また、フィジカルAIの登場によって従来のロボット開発のパラダイムから切り替わり、開発環境そのものが大きく変化していくという講演者の主張には強く同意します。最先端の技術を常にキャッチアップしていく姿勢を大切にしたいと感じました。一方で、こうした技術を実際のシステムとして成立させるためには、依然として高い技術的ハードルが存在するとも感じています。フィジカルAIやヒューマノイドを適用すべき領域と、従来の産業用ロボットを用いる方が適切な領域を見極めながら、過度に慎重になりすぎることなく、フィジカルAIを取り込んでいく姿勢が重要だと考えました。