

自動ティーチング位置補正システム概要
豆蔵では、溶接ロボットにおいて手動による補正作業を自動化するシステムを開発しました。
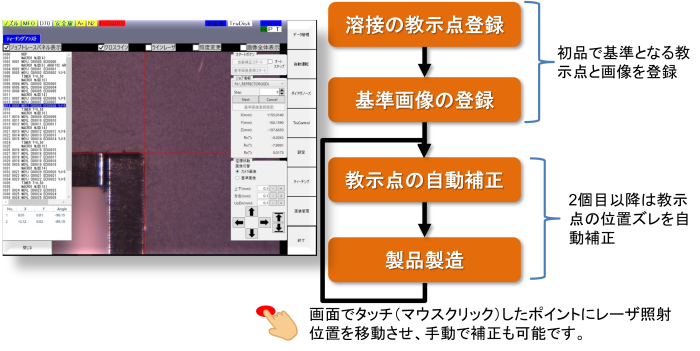
初回に登録した基準画像を元に、リピート品はカメラでズレを検出しティーチング位置補正します。
既に溶接ロボットを導入しているお客様や、今後ロボット化を検討されるお客様に、新しい機能としてこのシステムを提案させていただきます。
- レーザ溶接ロボットシステムで、同じワークを繰り返し溶接する時、オペレータのペンダント操作による再ティーチング不要
- ワーク個体差、ワーク歪、治具固定誤差、などを画像処理で補正
- 豆蔵製レーザ溶接ロボットシステム、及び安川電機製MOTOMANロボットを使用した自動溶接システムに適用可
- 生産性の向上
溶接工程の課題と解決策
【課題】
- 日本の製造業は、人手不足が課題ですが、板金加工業界でも人材確保と定着が難しい状況です。
- 特に板金加工の溶接工程で人手不足が深刻となっています。
- 人手不足を解消するため、近年はレーザ溶接の自動システムにロボットの活用が広がっていますが、こちらでも課題があります。
- ロボットによるレーザ溶接では、同じワークの繰り返しであっても、ワーク個体差や溶接する事によるワークの歪、治具等の設置誤差などの要因により、手動補正する必要があり、稼働率の向上が妨げられています。
【解決策】
豆蔵で開発した自動ティーチング位置補正機能を使い、リピート品のティーチング位置補正時間をほぼゼロにします。
これにより作業者の経験に関係なく生産性が上がり、コストダウンに繋がります。
溶接工程 ティーチング補正の問題と課題
|
ワークの個体差や曲げ角度誤差、治具固定の誤差があるため、ジョブのティーチング位置を毎回補正する必要があります。 補正作業は大きなプログラミングペンダントを抱えてロボットの近辺でモニタを見ながら行う必要があります。 
稼働率向上の阻害要因 |
リピート加工でワーク毎に繰り返すティーチング位置補正作業 |
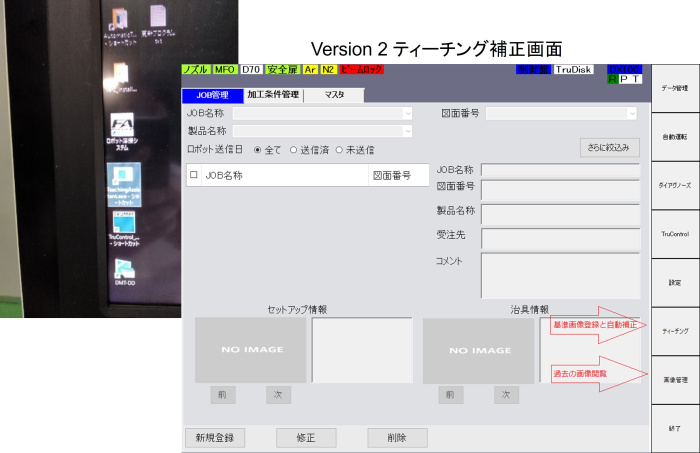
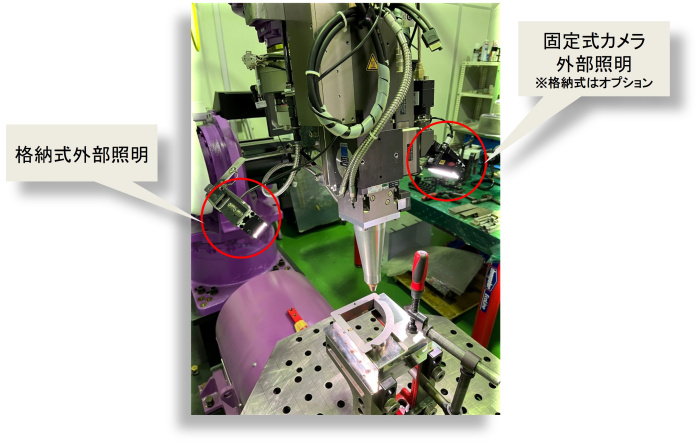
溶接工程 自動ティーチング位置補正ソリューション
操作パネル
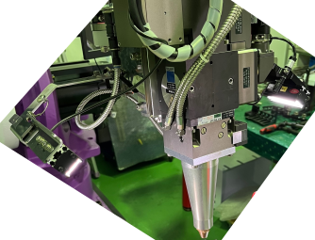
外観図
動画:自動ティーチング位置補正
製品の個体差や段取りの教示点ズレを自動で補正します
自動ティーチング位置補正実施例(SUS304 t1.0 コーナー半掛け溶接)
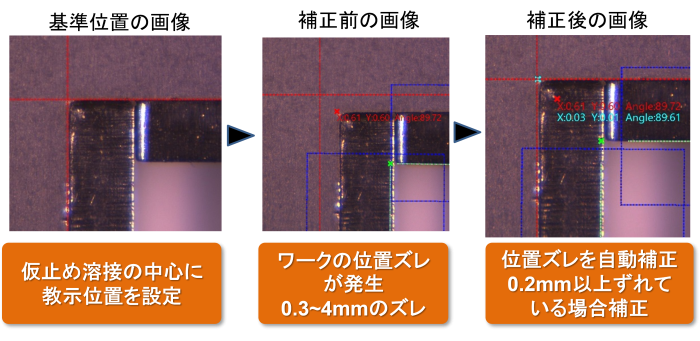
■補正動作をする事で、位置精度0.1㎜程度に収まります。
■最初にZ軸補正(新開発機能)してピントを合わせ、その後XY軸の補正をします。
動画:自動ティーチング位置補正実施例
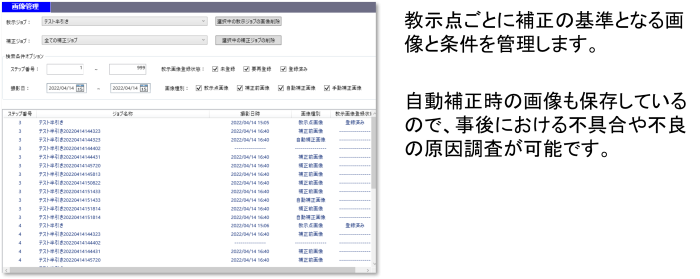
カメラによる画像処理が困難な場合

製品ごとに補正条件の管理と再利用が簡単にできます
自動ティーチング位置補正の動作モード
|
|
本機能は、これからも、更に進化を続けて参ります。
ご検討いただきますよう何卒よろしくお願い申し上げます。