

背景
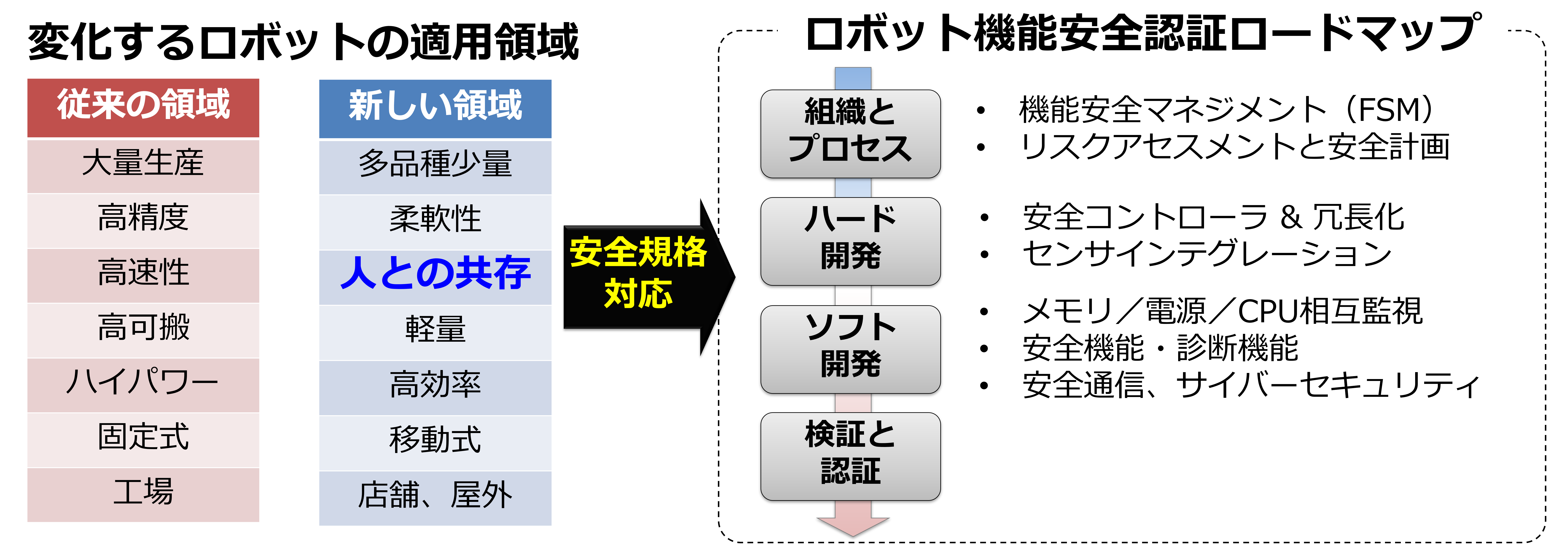
産業用ロボットは主に自動車や電気電子産業の大量生産において、高精度・高速に繰り返し動作をすることで成功を収めてきましたが、昨今では消費者ニーズの多様化から、多品種少量生産・変種変量生産が主流になってきてきました。また、これまではロボットが導入されていなかった食品、農業、建築、店舗などのロングテール市場においても、労働力不足からロボット導入のニーズが高まっています。これらの作業におけるロボットには、従来とは異なる性能(柔軟性、人共存など)が求められ、ロボットの仕様や設計も多様化しています。
サービスの特徴
豆蔵は、強みであるシステム工学、ソフトウェア工学にロボット工学を加え、工学的な手法に基づいてロボット開発を行います。ロボットを構成するソフト・メカ・エレキ・AIのエキスパートが在籍しており、ワンストップで開発することができるため、開発スピードが早いことが特徴です。商品企画から設計、実装、テストまで開発ライフサイクル全般に渡ってご支援が可能です。また、試作開発だけでなく製品開発(量産設計)への対応も実績があります。
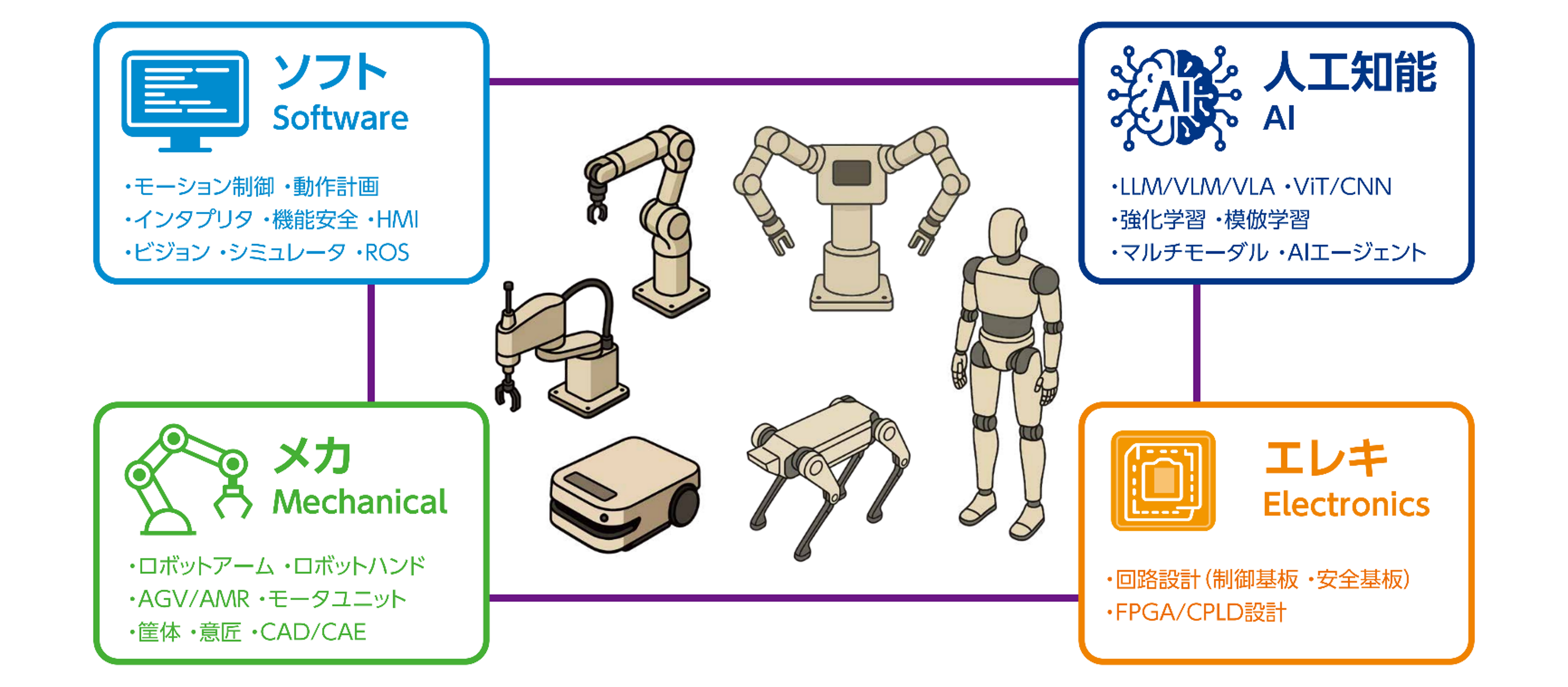
・ロボット開発のエキスパートがお客様のロボット開発を支援
・メカ・エレキ・ソフト・AIの全領域に渡ってワンストップで効率的に開発
・商品企画、構想設計、システム設計、システム開発の開発ライフサイクル全般に対応
・試作開発だけでなく製品開発(量産設計)まで対応可能
・産業用ロボット、協働ロボット、AGV/AMR、ヒューマノイドなど、豊富な開発実績
主な顧客と想定支援
| 主な顧客 | 想定するご支援内容(一例) |
|---|---|
| 老舗ロボットメーカ様 | ・ロボット製品の新規開発(ゼロイチ開発) ・アーキテクチャ刷新 ・AIロボティクスへの対応 |
| 新興ロボットメーカ様 | ・用途特化型のオリジナルロボットの開発 |
| セットメーカ様 | ・システムに組み込むカスタムロボットの開発 |
| ユーザ企業様 | ・自社工場向けロボットの内製開発 |
※市販ロボットを使ったロボットシステムの開発は「工場の自動化サービス(ロボット導入支援)」をご参照ください
機能安全対応オリジナルロボット開発サービス(新興ロボットメーカ様向け)
ロボット適用領域の多様化に伴い、特定用途に特化したオリジナルロボットを開発される新興ロボットメーカ様が多く登場してきています。ロボットは本質的に危険なものであるので、機能安全への対応は必須となります。安全性の証明には第三者認証が最も効果的ですが、これには莫大な投資と開発期間が必要となり、新興ロボットメーカ様にとって最も課題となるところです。
老舗ロボットメーカ様には機能安全対応の設計ノウハウ・資産がありますが、新興ロボットメーカ様が同様の開発をしていては、タイムリーに市場に製品を投入できません。豆蔵では強力なパートナーシップにより実績のあるパートナ企業の技術を集結した「協働ロボット特化型 エコシステム」を構築しました。これにより、機能安全に対応したロボット開発を低コスト・スピーディに行える環境を整備しました。
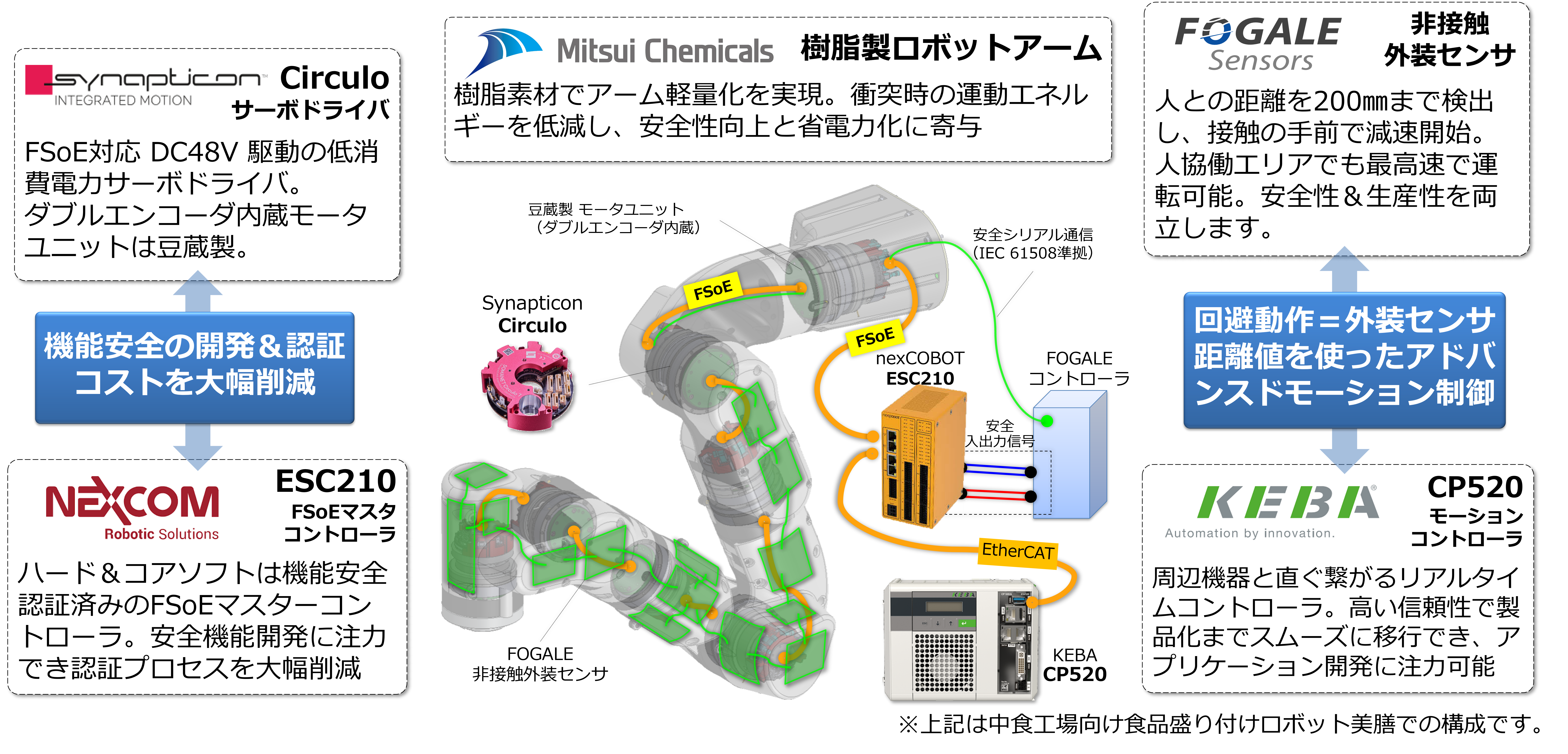
・構想段階からのサポート: 具体的な仕様が決まっていない段階から、用途に合わせたアーム長や可搬重量、タクトタイムの検討、駆動部の要求仕様などの要件定義からご支援します。
・認証取得への伴走: 機能安全認証の取得を見据えた開発プロセスを提案し、スムーズな製品化をバックアップします。
ロボット開発事例
6軸垂直多関節 産業用ロボットの開発
顧客:海外ロボットメーカ様
製品:6軸垂直多関節 産業用ロボット(溶接・研磨・パレタイジング用途)
課題:
・ロボットは他社からOEM提供を受けているが、自社製のロボットコントローラを開発したい
・ロボットアームのラインナップを増やしたい
主なご支援内容:
・ロボットアーム(3kg可搬、20kg可搬、165kg可搬)のメカ設計
・ロボットコントローラ、ティーチングペンダントのエレキ、ソフトの新規開発
・ロボットシミュレータ、オフラインティーチングソフトの新規開発
・溶接機能(ウィービング、タッチセンシングなど)の開発
ご支援フェーズ:構想設計~量産設計まで(量産は顧客にて実施)
双腕協働ロボットの開発
顧客:国内ロボットメーカ様
製品:7軸双腕協働ロボット(ハンドリング・組み立て用途)
課題:
・AI時代に対応する、先進的な双腕協働ロボットを企画している
・これまでの資産に囚われず、新しい設計で開発したい
・自社には開発リソースやソフトの知見が不足している
主なご支援内容:
・人型ロボット、コントローラのメカ設計
・ロボットコントローラ、ティーチングペンダント(タブレット)のソフトの新規開発
・ROS 2、ビジュアルプログラミング(Blockly)、ロボットプログラム(Python)に対応
・双腕協調制御、腰軸協調制御、特異点回避のアルゴリズム開発
・7軸ロボットアーム制御(運動学、動力学)、ダイレクトティーチ機能、衝突検知機能の開発
ご支援フェーズ:商品企画~試作開発まで(製品開発は顧客で実施)
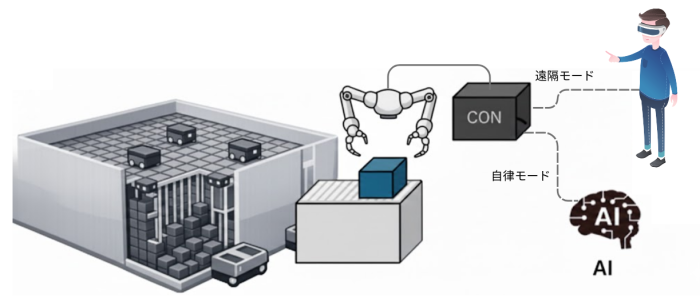
物流向けピッキングロボットの開発
顧客:自動倉庫メーカ様
製品:7軸双腕ロボット(ピッキング用途)
課題:
・自動倉庫からのピッキング工程のロボットで自動化したい
・ピッキング作業に特化したオリジナルのロボットアーム、コントローラにしたい
・自律的にピッキングするAIを開発し、難しいワークは遠隔操作できるようにしたい
主なご支援内容:
・顧客との分業体制(メカ:顧客、エレキ・ソフト:豆蔵)
・遠隔モード、自律モードに対応したロボットコントローラソフトの新規開発
・ビジョンAIの開発、動作計画、把持計画のソフト開発
ご支援フェーズ:構想設計~試作開発まで(試作開発後にスキルトランスファー)
自社工場向けAMRの内製開発
顧客:電機メーカ様
課題:
・物流2024年問題にて工場間での資材搬送や、工場内での部品搬送のニーズが高まっている
・市販の汎用AMRを検討したが、高額であること、工場の環境制約などから、導入が進まなかった
主なご支援内容:
・自社工場での使用に特化した仕様で、低価格のAMRを内製開発(メカ、エレキ、ソフト)
・自己位置推定、自律走行、障害物回避などのコア技術を開発
ご支援フェーズ:構想設計~試作開発まで(試作開発後にスキルトランスファー)
食品盛り付けロボットの開発

顧客:三井化学株式会社様と豆蔵の共同開発
課題:
・中食工場が抱える課題を解決する用途特化型ロボットシステムの開発
・盛り付け工程の人手不足解消、多品種生産、自動化の難易度が高い
豆蔵の役割:
・システム要件定義、システム設計
・ロボットアーム、コントローラのメカ・エレキ設計
・モーション・ビジョンAI・GUIのソフト開発
・リスクアセスメント、機能安全対応
・商品企画から試作開発、量産設計までを実施(製造は三井化学様で実施)
詳細は、食品盛り付けロボット「美膳®」のページをご参照ください。
太陽光パネル清掃ロボットの開発
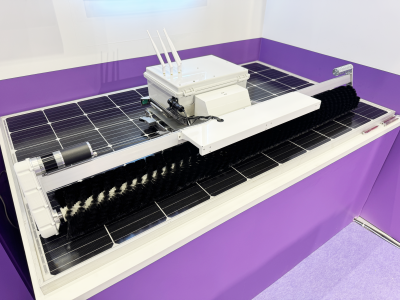
顧客:海外メーカ様と豆蔵の共同開発
課題:
・太陽光発電所が抱える課題を解決する用途特化型ロボットシステムの開発
・汚れの蓄積による発電効率の低下と収益の損失、保守点検の義務化、メンテナンス費用の増加、パネル損傷リスク
豆蔵の役割:
・システム要件定義、システム設計
・パワーユニット・コントローラユニット・
・自動清掃経路・ビジョン・GUIのソフト開発
・大規模発電施設でのフィールドテスト
・商品企画から試作開発、量産設計までを実施(
研究開発
豆蔵オリジナルロボット BEANusシリーズ(非売品)
豆蔵オリジナルのロボットも開発しておりますが、こちらはロボット開発支援サービスの適用事例として開発した試作品であるため、非売品となっております。
BEANus1

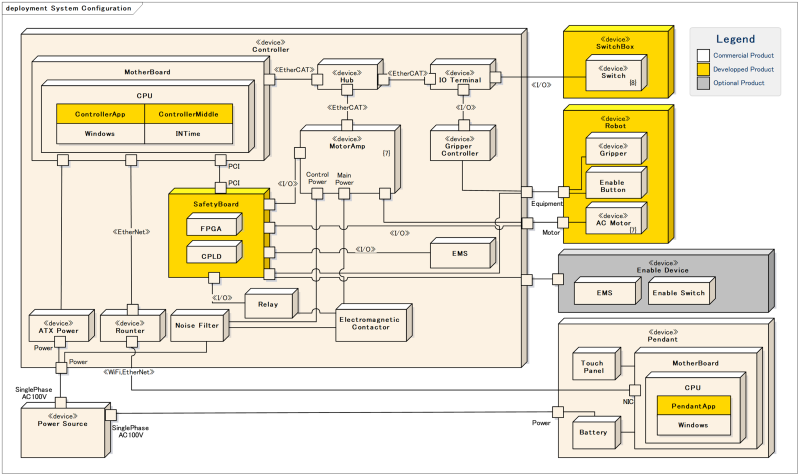
2017年に開発した初のオリジナルロボットとなります。ロボット開発支援サービスを適用することで、短期間(8ヶ月)でロボットアーム、コントローラ、ティーチングペンダントを開発することができました。ロボットシステムを構築する際、市販のロボットを購入するだけでなく、オリジナルロボットを作る、という選択肢を持っていただくことができます。
開発においては豆蔵が提唱するMBSE(Model-Based Systems Engineering)をロボット開発に適用し、モデル・シミュレーション技術を駆使することで効率的な開発を実現しました。
BEANus2
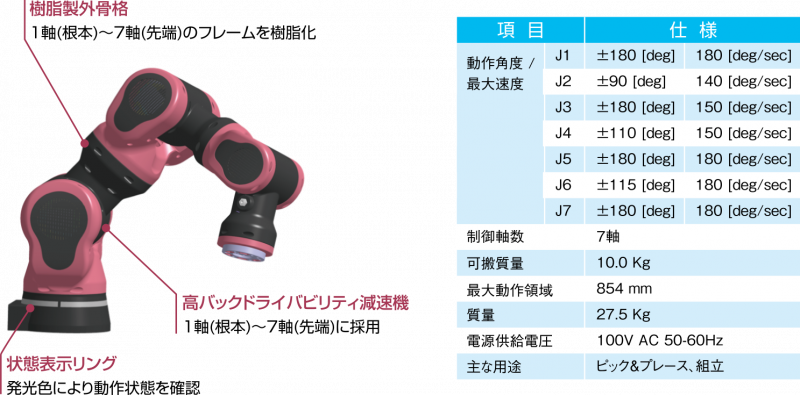
2020年に開発した2機種目のオリジナルロボットとなります。三井化学株式会社様、日本電産シンポ株式会社様(現:ニデックドライブテクノロジー株式会社様)と共同研究したロボットとなっております。ロボットアームのフレームに三井化学様の樹脂成形技術を採用して「軽さ」を実現、減速機に日本電産シンポ様の高バックドライバビリティ減速機を採用して「柔らかさ」を実現しています。
注:

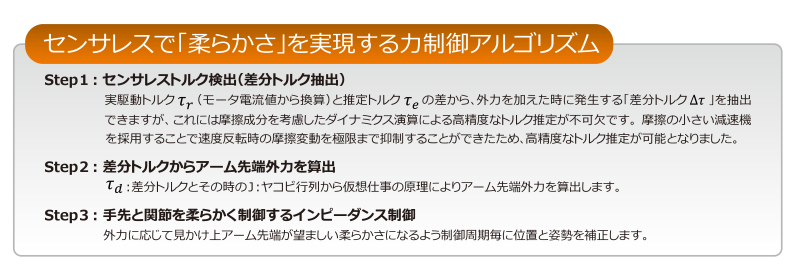
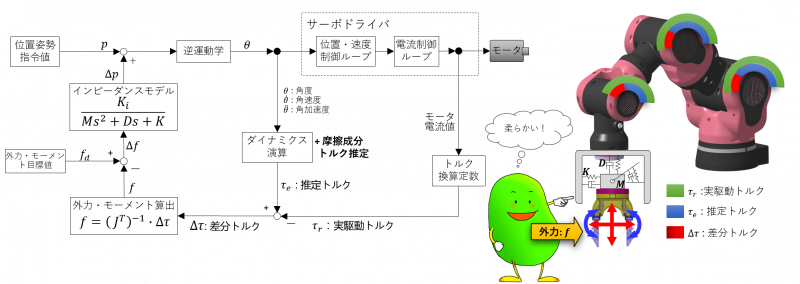
高バックドライバビリティ減速機を採用し、当社の力制御アルゴリズムを搭載することでトルクセンサレスでも衝突検知、ダイレクトティーチングが実現できました。
▼高バックドライバビリティ減速機を利用したBEANus2でのセンサレス力制御技術については下記論文に掲載されています。
「システム/制御/情報」 第68巻 第8号 「バックドライバビリティを有するロボットの社会実装」特集号
軽量センサレス協働ロボット(Beanus2) 豊島 勇大
産業用ロボットアーム設計手法(東京農工大との共同研究)
2016~2017年に国立大学法人 東京農工大学との共同研究により、産業用ロボットアームの開発期間を短縮する設計手法の実用化を実現しました。一般的に産業用ロボットアームの開発は試作による検証を繰り返すため、数年の開発期間が必要ですが、本共同研究により一度の試作でほぼ量産機レベルの実機製作が可能となりました。当社の持つソフトウェア技術、モデルベース開発プロセスと、東京農工大学 工学研究院 先端機械システム部門 遠山茂樹教授のロボット工学の知識とを融合し、少ない試作回数で競争力のある産業用ロボットを市場に出すための設計手法を構築/確立しました。

<メディア掲載>
2017年3月14日 サイエンスライター 森山氏著 iPROS『Tech Note』掲載
豆蔵+東京農工大、産業用ロボットの短期間設計手法を実現 誰でも高精度ロボットアームが作れる時代が到来
展示会の動画集
2025年 国際ロボット展
・食品盛り付けロボット「美膳®」デモンストレーション
・エンドユーザが動作変更可能なティーチングツールのデモンストレーション
2023年 国際ロボット展
・化粧品小袋ばら積みピッキングのデモンストレーション
2023年 名古屋ロボデックス
・金属部品バラ積み嵌合ロボットのデモンストレーション
2023年 ロボデックス
・食品工場の弁当盛り付けラインに模したデモンストレーション
2022年 国際ロボット展
・豆蔵オリジナル協働ロボット BEANus2非接触衝突回避のデモンストレーション
・中食工場向けの食品盛り付けロボットのデモンストレーション
2021年 ロボデックス
・BEANus2ダイレクトティーチのデモンストレーション
2019年 CEATEC
・ホログラフィックロボット遠隔操作のデモンストレーション
2018年 IoT/M2M展
・7軸協働ロボットがスポーツスタッキング(複数のプラスチック製カップを決められた型に積み上げたり崩したりして、スピードを競うスポーツ)のデモンストレーション
2017年 国際ロボット展
・豆蔵オリジナル7軸協働ロボットのデモンストレーション
関連ニュース
- 2025年11月21日 豆蔵と三井化学、中食工場の盛り付け工程の自動化を実現する 新型ロボット「美膳®(びぜん)」を共同開発
- 2025年08月05日 豆蔵がNEDO公募「ポスト5G情報通信システム基盤強化研究開発事業/ ロボティクス分野におけるソフトウェア開発基盤構築」の委託先に採択されました
- 2023年02月02日 日刊工業新聞 豆蔵、専門工具なし簡単交換 食品ロボ向けハンド
- 2023年02月01日 MONOist記事 3Dカメラによる移設容易なコンベヤートラッキング、ねぎをつかむ独自ハンドも
- 2022年03月30日 中部経済新聞記事 衝突回避システムなど披露 豆蔵、協働ロボット向けに
- 2021年02月25日 電子デバイス産業新聞記事 ロボット関連の取り組みを拡大 開発や導入を総合的に支援
- 2021年01月22日 MONOist記事 協働ロボットがトルクセンサレスで「柔らかさ」を実現、樹脂で軽量化も
- 2021年01月12日 豆蔵、日本電産シンポ、三井化学、3社共同研究により 「軽さ」「柔らかさ」を実現する協働ロボットの設計手法を確立
- 2018年05月21日 MONOist記事 ESEC2018&IoT/M2M展:協働ロボットを自社開発した豆蔵、売り物は産業用ロボットの開発支援サービス
- 2017年03月14日 iPROS『Tech Note』掲載 豆蔵+東京農工大、産業用ロボットの短期間設計手法を実現 誰でも高精度ロボットアームが作れる時代が到来